![]()
![]()
In none of these two different derivations we recover the result reported in the Appendix to the ESTEC Technical Assessment of GG (as released on October 7, 1996), namely:

The ESTEC Appendix contains in fact an incorrect definition of the non-rotating
damping forces which are needed to stabilize the whirling motions. On page 16 (lines
18-20) one can read: ``... non-rotating damping forces are obtained by virtue of the
naturally unavoidable viscous friction between the rotating body and the non-rotating
parts, ...". This is in fact the definition of the friction in the bearings,
which is not the non-rotating damping needed for stabilization (see below; see also the GG
Blue preprint, §III). Also incorrect are the definitions, given on page 41 (beginning of
Section 2.1) for the rotating and non-rotating damping. It is stated: ``Consider the
general case where ![]() represents the viscous damping
coefficient in the rotating frame, and
represents the viscous damping
coefficient in the rotating frame, and ![]() represents the viscous damping
coefficient in the inertial frame (`non-rotating damping')''. The damping coefficients
derive from physical friction, hence from dissipated energy, which do not depend on the
reference system from where they are looked at. The physical dimension of damping
coefficients is mass/time, which in Galilean mechanics does not depend on
the reference frame. The ``rotating damping'' and the ``non-rotating damping'' are not the
same effect as seen from different reference frames: they are the names of two different
types of damping in the same reference frame. They have different physical properties
(respectively in destabilizing and in stabilizing the rotor) that do not depend on the
reference frame. Moreover, as we have just said above, they have nothing to do with a
third type of damping: the viscous friction in the bearings.
represents the viscous damping
coefficient in the inertial frame (`non-rotating damping')''. The damping coefficients
derive from physical friction, hence from dissipated energy, which do not depend on the
reference system from where they are looked at. The physical dimension of damping
coefficients is mass/time, which in Galilean mechanics does not depend on
the reference frame. The ``rotating damping'' and the ``non-rotating damping'' are not the
same effect as seen from different reference frames: they are the names of two different
types of damping in the same reference frame. They have different physical properties
(respectively in destabilizing and in stabilizing the rotor) that do not depend on the
reference frame. Moreover, as we have just said above, they have nothing to do with a
third type of damping: the viscous friction in the bearings.
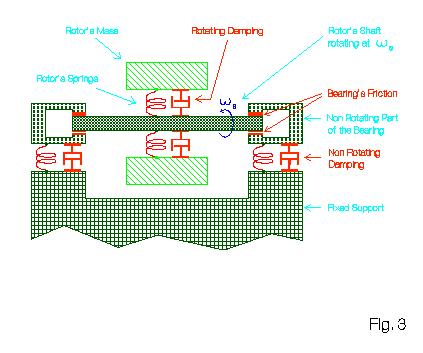
Figure 3: Rotating machine with rotating damping, non-rotating damping
and friction in the bearings.
In Fig. 3 we show the three general types of friction in a rotating machine, from which the correct definition of rotating and non-rotating damping is obtained. They are:
From a physical viewpoint the most important characteristic distinguishing the effects of rotating and non-rotating damping on one side from the effects of friction in the bearings on the other is that the former produce forces on the rotor, while the latter produces torques. They are therefore independent from one another and interact only to a second order, namely because of construction errors, asymmetries, misalignements etc. From this it follows that if one were in fact using the forces generated by the friction in the bearings in order to stabilize the whirling motions (rather than the forces due to non rotating damping), he would inevitably need extremely large forces.
As for the amplifying factor ![]() claimed in the ESTEC Appendix as
due to the fact that the active dampers are fixed to the rotating bodies, we have shown in
§4 above that there is no physical grounds for it. So, the results of the ESTEC Appendix
are based on the use of supposedly ``stabilizing'' forces which are a factor
claimed in the ESTEC Appendix as
due to the fact that the active dampers are fixed to the rotating bodies, we have shown in
§4 above that there is no physical grounds for it. So, the results of the ESTEC Appendix
are based on the use of supposedly ``stabilizing'' forces which are a factor ![]() larger than we have shown (both theoretically and with numerical simulations) to be
sufficient for damping the GG whirling motions. Let us see what is the effect of the huge ESTEC
``stabilizing'' force when applied to one of the masses m undergoing a
destabilizing forward whirling motion at frequency
larger than we have shown (both theoretically and with numerical simulations) to be
sufficient for damping the GG whirling motions. Let us see what is the effect of the huge ESTEC
``stabilizing'' force when applied to one of the masses m undergoing a
destabilizing forward whirling motion at frequency ![]() (as demonstrated by Eqs.
(11) to (14) for all cases except the one of very high viscous damping, which can be ruled
out in GG) at distance
(as demonstrated by Eqs.
(11) to (14) for all cases except the one of very high viscous damping, which can be ruled
out in GG) at distance ![]() from the equilibrium position. Since the ESTEC
``stabilizing'' force amounts to
from the equilibrium position. Since the ESTEC
``stabilizing'' force amounts to ![]() it is apparent that it is compatible with
two effects. In one case it could force the body to whirl at angular velocity
it is apparent that it is compatible with
two effects. In one case it could force the body to whirl at angular velocity ![]() , much
larger than its previous angular velocity of whirl
, much
larger than its previous angular velocity of whirl ![]() when the system was
undamped, at a distance
when the system was
undamped, at a distance ![]() from the equilibrium position, or, it
could maintain the angular velocity of whirl of the undamped situation while pushing the
body a distance
from the equilibrium position, or, it
could maintain the angular velocity of whirl of the undamped situation while pushing the
body a distance ![]() away from the equilibrium position. If
away from the equilibrium position. If ![]() and Q is rather
small (e.g. 20 for the PGB and 500 for the test masses), then it is apparent that in
either case the huge ESTEC force, far from damping the whirling motions would force the
two masses into a totally wrong dynamical configuration overcoming the spring forces and
thus disrupting the whole experiment.
and Q is rather
small (e.g. 20 for the PGB and 500 for the test masses), then it is apparent that in
either case the huge ESTEC force, far from damping the whirling motions would force the
two masses into a totally wrong dynamical configuration overcoming the spring forces and
thus disrupting the whole experiment.
![]()
(Anna Nobili- nobili@dm.unipi.it)